2.Instalación
Antes de iniciar la instalación, verifique el funcionamiento correcto de los sensores. Complete los siguientes pasos:
1.Coloque los sensores en el orden correcto revisando las etiquetas en los sensores
y los documentos incluidos.
2.Comenzando con el primer sensor, conecte los sensores enchufando el conector macho del segundo sensor en el conector hembra del primer sensor. Proceda de esta manera hasta que el conjunto completo esté conectado.
1:

Figura 1: Detalle de la conexión de los cables
¡Precaución! Cuando conecte los sensores, asegúrese de alinear el punto de orientación en el lado exterior del conector macho con los dos puntos de orientación en el lado exterior del conector hembra. Esto garantizará que los pines y los receptáculos en el interior de los conectores se alineen correctamente. Empuje los conectores el uno hacia el otro hasta que se hayan acoplado completamente.
2:

3.Conecte el conjunto completo a un convertidor modelo 8020-38, PC o registrador de datos (consulte Sección 2.6).
4.Sostenga el sensor en posición vertical y observe la lectura. El sensor de inclinación debe mantenerse estable mientras se toma la lectura. La lectura observada debería estar cerca de la lectura vertical de fábrica. La inclinación del sensor en dirección positiva (A+ o B+, como se marca en el sensor) debería resultar en lecturas crecientes. La inclinación del sensor en dirección negativa (A- o B-) debería resultar en lecturas decrecientes. La temperatura indicada en el dispositivo de lectura debería ser cercana a la temperatura ambiente. Repita el proceso con los sensores restantes.
5.Una vez completadas las pruebas preliminares, desconecte el conjunto del dispositivo de lectura y desconecte los sensores entre sí.
En caso de que cualquiera de estas pruebas preliminares falle, vea Sección 5 para identificar y solucionar el problema.
geokon recomienda ampliamente conectar un cable de seguridad al sensor (terminal) situado más abajo, modelo 6180T. Esto se puede utilizar para recuperar el conjunto en caso de accidente, y también puede ser útil cuando se baja el conjunto a la carcasa.
Los conjuntos de cables de seguridad modelo 6180-6 comprados en geokon consisten en un cable de avión de una longitud especificada por el cliente (07-125SS316-E/M) con perno de argolla y tuercas hexagonales preinstaladas para facilitar la instalación, junto con todo el equipo necesario para anclar la cuerda.
Para conectar el cable de seguridad al sensor terminal, complete los pasos siguientes:
1.Sujete el extremo superior del cable de seguridad a un objeto fijo o algo demasiado grande para entrar en la carcasa, para evitar que todo el cable caiga accidentalmente dentro de la carcasa.
2.Retire las dos tuercas hexagonales del perno de argolla.
3.Inserte el perno de argolla a través de ambos orificios de conexión en el sensor terminal.
4.Vuelva a enroscar las dos tuercas en el perno y apriete una contra la otra usando dos llaves españolas de 5/16 "; esto asegurará el cable de seguridad al sensor terminal.
La figura a continuación muestra un cable de seguridad conectado adecuadamente.
3:
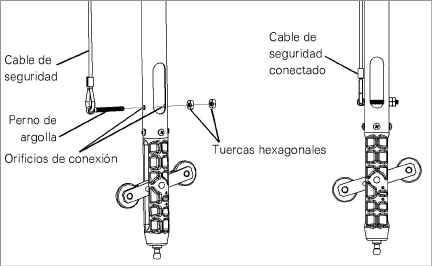
Figura 3: Conexión de cable de seguridad
5.Amarre el extremo superior del cable de seguridad sujetándolo a un punto de anclaje apropiado. Siga el procedimiento de Sección 2.5.1 para la instalación adecuada de las abrazaderas de cable.
Todos los ensamblajes de las ruedas deben orientarse en la misma dirección cuando se instalen en la carcasa. Los ensamblajes de las ruedas se colocan en la fábrica de forma que la rueda superior esté viendo en la dirección A+ del sensor (como se muestra en la figura a continuación). Las direcciones de los ejes también están etiquetadas físicamente en cada sensor.
4:
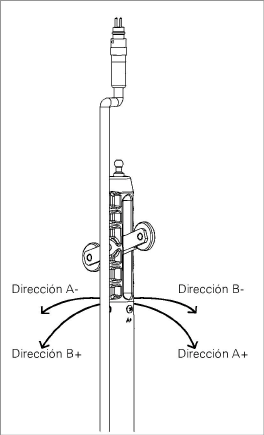
Apunte la dirección A+ en la misma dirección del movimiento anticipado, es decir, hacia la excavación que se monitorea o pendiente abajo para aplicaciones de evaluación de pendientes.
El dispositivo MEMS monitorea las direcciones A y B. La dirección B+ es de 90 grados en el sentido de las agujas del reloj desde la dirección A+, visto desde arriba.
El primer sensor que se instala es el sensor terminal modelo 6180T, que incluye dos juegos de ruedas.
2.4.1Suspenda el primer sensor
1.Inserte el sensor 6180T en la carcasa, asegurándose de orientar las ruedas correctamente para la orientación correcta del eje (consulte Sección 2.3) y con el conector del cable macho hacia la parte superior de la carcasa.
2.Con el cable de seguridad conectado, baje el primer sensor en el orificio de la carcasa, hasta que los orificios de soporte de ¼" estén adyacentes a la parte superior de la carcasa.
3.Suspenda el sensor en su lugar en la parte superior de la carcasa insertando un destornillador
o varilla de ¼" de diámetro a través del orificio de soporte en el costado del sensor.
Como referencia, vea las figuras a continuación.
5:
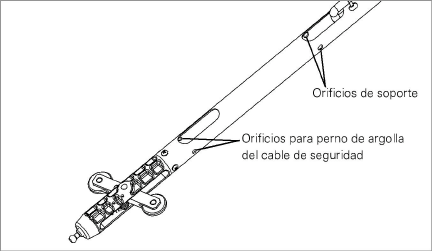
Figura 5: Orificios para pernos de argolla del cable de seguridad vs Orificios de soporte
6:
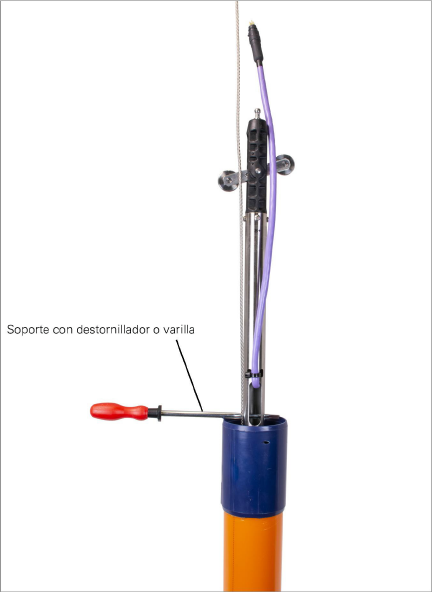
Figura 6: Soporte sensor con varilla
2.4.2Conexión del segundo sensor al primer sensor
1.Cada segmento del 6180 se suministra con un pasador de bloqueo con lengüeta preinstalado.
7:
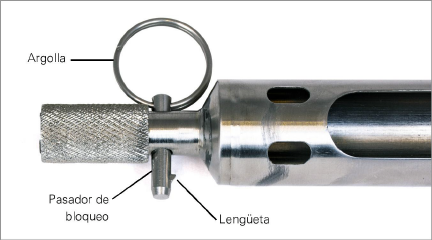
Figura 7: Pasador de bloqueo preinsertado
2.Retire el pasador de bloqueo presionando la lengüeta y tirando de la argolla al mismo tiempo.
8:

Figura 8: Retire el pasador de bloqueo
3.Retraiga la cubierta del resorte en el segundo sensor y acople el perno de bola del primer sensor al receptor del segundo sensor conectándolos con un movimiento lateral.
9:

Figura 9: Retraiga la cubierta del resorte
4.Capture el perno de bola liberando la cubierta del resorte (asegúrese que la cubierta regrese a su posición inicial).
10:
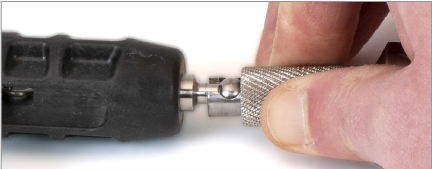
Figura 10: Capture el perno de bola
5.Reinserte el pasador de bloqueo para prevenir que la funda se retraiga mientras está en uso.
11:

Figura 11: Conexión completa
6.Enchufe el conector macho del cable de señal del primer sensor al conector hembra del cable de señal del segundo sensor.
¡Precaución! Cuando conecte los sensores, asegúrese de alinear los dos puntos de orientación en el exterior del conector hembra con el punto de orientación en el exterior del conector macho. Esto garantizará que los pines y los receptáculos en el interior de los conectores se alineen correctamente. Empuje los conectores macho y hembra el uno hacia el otro hasta que se hayan acoplado completamente.
12:

Figura 12: Detalle de la conexión de los cables
Nota: Para seguridad adicional, pegue los conectores con cinta adhesiva.
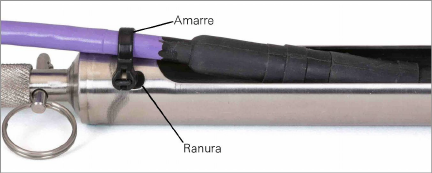
7.Utilizando el amarre suministrado, asegure el cable del conector macho al tubo del segundo sensor introduciendo el amarre a través de las ranuras paralelas, alrededor del cable y de regreso a sí mismo; esto ayudará a aliviar la tensión de los conectores. Recorte el trozo sobrante del amarre. Vea la figura a continuación.
13:
8.Retire el destornillador/varilla del primer sensor y, con el cable de seguridad conectado, baje el segundo sensor en el orificio de la carcasa, hasta que los orificios de soporte de ¼" estén adyacentes a la parte superior de la carcasa. Asegúrese de orientar correctamente la dirección A+ de cada sensor al insertarlo en la carcasa.
9.Suspenda el segundo sensor en su lugar en la parte superior de la carcasa insertando un destornillador o varilla de ¼" de diámetro a través del orificio de soporte en el costado del sensor.
10.Repita los pasos 2 a 9 anteriores para cada sensor subsiguiente.
11.Enchufe el conector macho del sensor más superior al conector hembra del cable de lectura (6180-3-1, 6180-3-2 o 6180-3V). Conecte el otro extremo del cable de lectura al dispositivo de lectura o registrador de datos.
2.5Conexión del soporte de suspensión
Para asegurar que la cuerda esté instalada a la profundidad correcta, sume las longitudes de los sensores y reste este valor de la profundidad deseada de la cuerda (medida desde la parte superior de la carcasa hasta la parte inferior del conjunto de la cuerda); el valor resultante es la longitud del cable de suspensión.
Nota: geokon sugiere suspender el conjunto de sensores al menos 150 mm (seis pulgadas) por encima de la parte inferior de la carcasa, para tener en cuenta los escombros y sedimentos.
2.5.1Conecte el conjunto de cables al soporte
1.Enganche el dedal suministrado a través del ojal del lado inferior del soporte de suspensión (6180-2).
2.Pase el extremo del cable sin aislamiento del conjunto de cables de suspensión (6180-1) a través del ojal del lado inferior del soporte de suspensión.
3.Pase el cable a través del ojal hasta que la distancia desde el borde de soporte del brazo de suspensión hasta el extremo del receptor de suspensión sea igual a la longitud del cable de suspensión calculada previamente.
4.Doble el "extremo sin salida" del cable hacia el "extremo vivo", luego asegure una de las abrazaderas de cable suministradas al cable a una distancia de aproximadamente 3.5 pulgadas del ojal del lado inferior del soporte de suspensión. (Instale las tuercas de la abrazadera del cable firmemente, pero no las apriete todavía).
5.Oriente la abrazadera del cable con los dos extremos del perno en U mirando hacia el "extremo vivo" del cable como se muestra a continuación.
14:
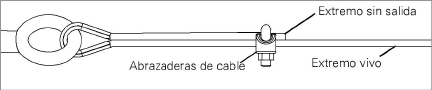
Figura 14: Coloque la primera abrazadera de cable
6.Asiente el lazo formado por el cable en el canal del dedal.
7.Instale una segunda abrazadera en el cable en la base del dedal (vea la imagen a continuación).
15:
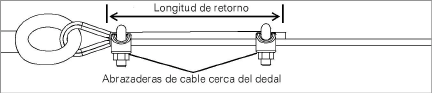
Figura 15: Coloque la segunda abrazadera de cable
8.Ajuste la primera abrazadera de cable de modo que la "longitud de retorno" mida aproximadamente 3.25 pulgadas.
9.Aplique una ligera tensión al cable para eliminar toda la holgura. Apriete las cuatro tuercas de la abrazadera de cable a una especificación de torque de aproximadamente 4.5 pies-libra.
10.Si lo desea, la tercera abrazadera de cable suministrada se puede instalar entre la primera y la segunda abrazaderas de cable (asegúrese de apretar las tuercas al torque especificado anteriormente).
11.Recorte el cable sobrante del "extremo sin salida", dejando al menos 3/8 de pulgada de largo desde la primera abrazadera de cable. Alternativamente, envuelva el extremo del cable con cinta adhesiva y luego péguelo con cinta adhesiva a la longitud principal del cable de suspensión.
16:
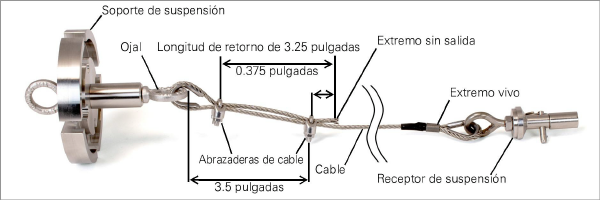
Figura 16: Cable de suspensión ensamblado (ejemplo)
2.5.2Conecte el conjunto de cables al conjunto de sensores
El conjunto del cable de suspensión se conecta a la serie de sensores de manera similar a como los sensores se conectan entre sí. Para pasos ilustrados, consulte Sección 2.4.2.
1.Retire el pasador de bloqueo del receptor de suspensión presionando la lengüeta y tirando de la argolla al mismo tiempo.
2.Retraiga la cubierta del resorte en el receptor de suspensión y acople el perno de bola del sensor más superior al receptor de suspensión conectándolos con un movimiento lateral.
3.Suelte la cubierta del resorte para asegurar el perno de bola dentro de la cubierta.
4.Reinserte el pasador de bloqueo para prevenir que la funda se retraiga mientras está en uso.
2.5.3Baje el sensor más superior
Baje el sensor más superior a la carcasa y ubique el soporte de suspensión en la parte superior de la carcasa.
¡Importante! Asegúrese que el borde superior de la carcasa esté relativamente centrado para asentar correctamente el soporte de suspensión.
Las lecturas se pueden tomar inmediatamente después de la instalación; sin embargo, geokon recomienda evaluar los datos durante un período de tiempo para determinar cuándo el conjunto se ha estabilizado lo suficiente y cuándo deben establecerse las lecturas en cero.
2.6Convertidor de RS-485 a TTL/USB modelo 8020-38.
geokon fabrica el Convertidor de bus direccionable modelo 8020-38 para conectar conjuntos de sensores direccionables a computadoras personales, dispositivos de lectura, registradores de datos y controladores lógicos programables. El convertidor actúa como un puente usando los protocolos TTL o USB entre los lectores y los conjuntos de sensores habilitados para RS-485 de geokon.
Para obtener más información, consulte el Manual de instrucciones del modelo 8020-38.

Figura 17: Convertidor de RS-485 a TTL/USB modelo 8020-38.
Nota: El registrador de datos que utilice debe contar con el puerto apropiado disponible.
18:
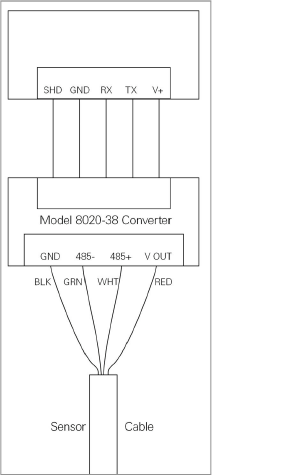
Figura 18: Cableado de registrador de datos sin conversión RS-485 incorporada
nSi su registrador de datos no cuenta con comunicación RS-485 incorporada, conecte el cableado usando el diagrama a continuación.
nSi su registrador de datos si cuenta con comunicación RS-485 incorporada, conecte el cableado usando el diagrama en la figura a continuación.
19:
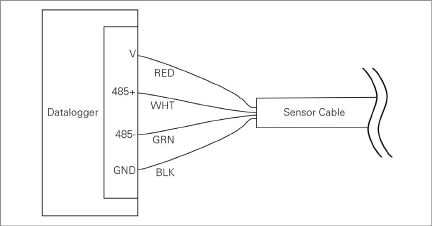
Figura 19: Cableado de registrador de datos con conversión RS-485 incorporada
2.7Conector de cuatro pines resistente al agua
Los pines de los conectores macho y hembra de cuatro pines se muestran a continuación; la función de cada cable se detalla en Tabla 1 a continuación.
20:
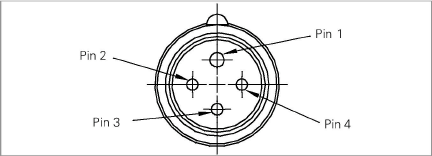
Figura 20: Conector macho resistente al agua
21:
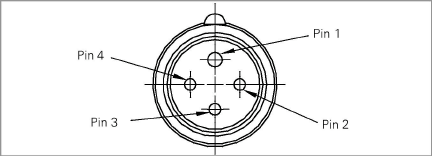
Figura 21: Conector hembra resistente al agua
|
Pin |
Color del cable |
Función |
|
1 |
Rojo |
Alimentación |
|
2 |
Negro |
Conexión a tierra |
|
3 |
Blanco |
RS-485+ Datos Alto |
|
4 |
Verde |
RS-485- Datos Bajo |